 ЦНЬЈШШЯп
ЦНЬЈШШЯп



ABBЛњЦїШЫЕуКИгІгУЙЄвегыЙиЗўЮёЪ§ОнНтЮі
АцШЈЙщдзїепЫљгаЃЌШчгаЧжШЈЃЌЧыгыЮвСЊЯЕЩОГ§ЁЃ
ЕуКИжаР§ааГЬађЕФЪЙгУ
Ј
ManualGunSearch
дкЯЕЭГжаЫбЫїПЩгУЕФЫХЗўХч***ЃЌВЂНЋЦфУћГЦЬэМгЕНЕБЧАgundataжаЕФХч***УћГЦжаЁЃ
ManualGunControl
ИљОнcurr_forcedataжаЕФЪ§ОнЙиБеЛђДђПЊХч***ЁЃ***ОљКтаХКХвВБЛМЄЛю/ЭЃгУЁЃ
ManGunPosition
ДђПЊЛђЙиБеЦјЖЏХч***ЕНДѓааГЬЛђЙЄзїааГЬЮЛжУЁЃ
ManualSpot
ИљОнЪ§ОндкЕБЧАЮЛжУНјааКИНг
curr_spotdata ЁЃ
ManualSetForce
жДааSetForceИљОнЪ§ОнВйзїcurr_forcedataЁЃ***ОљКтаХКХвВБЛМЄЛю/ЭЃгУЁЃ
ManualCalib
жДааЫХЗўХч***ЕФаЃзМЃЌ1ЛЛЕЖЃЌ2ЛЛЭЗЛђ3***ФЅЫ№аЃзМЁЃ
жДааSpotL / JЛђSpotML /MJжИСюЪБЕФФкВПСїГЬЫГађ
1ЁЂжДааЪ§ОнЖЈвхгУЛЇР§ГЬЃЈР§ШчDefineSpotDataЃЉ
2ЁЂКИНгГЬађБрКХвбЩшЖЈЃЈР§Шч.g1_weld_progЃЉ
3ЁЂШчЙћвбХфжУЃЌдђЩшжУаТГЬађбЁдёаХКХЁЃ
4ЁЂЛњЦїШЫКЭХч***ПЊЪМЯђБрГЬЮЛжУвЦЖЏЁЃ
5ЁЂШчЙћвбХфжУЃЌИУЙ§ГЬНЋМьВщВЂЕШД§РДздКИНгПижЦЦїЕФГЬађгааЇаХКХЁЃ
6ЁЂШчЙћвбХфжУЃЌИУЙ§ГЬНЋЖСШЁКИНгПижЦЦїзщЃЈР§Шчg1_gun_forceЃЉЁЃ
7ЁЂШчЙћвбХфжУЃЌдђжижУаТГЬађбЁдёаХКХЁЃ
8ЁЂжДааUpdateSpotDataЁЃ
9ЁЂSwInitUserIOвбжДааЁЃ
10ЁЂSwPrepareвбжДааЁЃ
11ЁЂИљОндЄЖЈвхЕФдЄБеКЯЪБМфжДааSwCloseGunЁЃ
12ЁЂдкЕНДяЮЛжУжЎЧА***НЋПЊЪМЙиБеЃЈГ§ЗЧВЮЪ§\InPosЪЙгУЃЉЃЌИљОндЄЖЈвхЕФ***дЄЙиБеЪБМфЁЃ
13ЁЂИљОндЄЖЈвхЕФдЄОљКтЪБМфЩшжУОљКтаХКХЃЈР§Шчg1_equalizeЃЉЁЃ
14ЁЂДяЕНКИНгЮЛжУЪБжДааSwPreWeldЃЈPreweldМрЖНЃЉ
15ЁЂМьВщАхКёЖШЃЈНіЯоЫХЗў***ЃЉШчЙћШЗЖЈЃЌдђНЈСЂЫљашЕФ***СІЁЃ
16ЁЂЩшЖЈКИНгПижЦЦїЕФЦєЖЏаХКХЃЈР§Шчg1_start_weldЃЉЁЃ
17ЁЂ КИНгПижЦЦїжДааКИНгЃЌВЂЧвШчЙћХфжУЃЌПЩвддкКИНгађСаЦкМфИФБфКИ***СІЁЃ
18ЁЂЕБНгЪеЕНРДздКИНгПижЦЦїЕФКИНгЭъГЩаХКХЪБЃЈР§Шчg1_weld_completeЃЉ,НЋжижУЦєЖЏаХКХВЂЧв***НЋПЊЪМДђПЊВЂЧвОљКтаХКХНЋБЛжижУЁЃ
19ЁЂSwOpenGunБЛжДаа
20ЁЂжДааSwPostWeldЁЃ
21ЁЂжИСювбзМБИОЭаїЁЃ
ЕуКИЕФЪ§ОнРраЭ
Ј
Ъ§ОнРраЭ
гУгкЖЈвх
spotdata
ЕуКИЙЄвеЃЌКИНгГЬађБрКХЃЌ***СІЕШ
gundata
ЕуКИЩшБИЃЌ***УћЃЌКИНгМЦЪ§ЦїЕШ
forcedata
ИУSetForceЙ§ГЬжаЃЌ***ЕШСІ
SIMDATA
ЗТецФЃЪНЃЌПижЦЦїЗТецЃЌЖЈЪБЦїЗТецЕШ
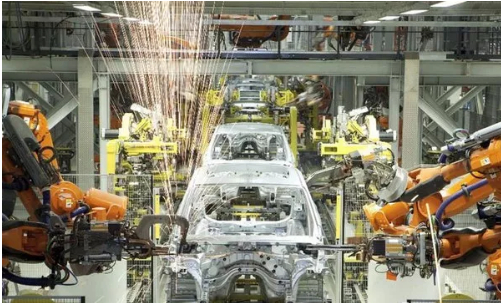
КИНгЙЄвеЪБађЪОвтЭМ
Ј
ИќЖрABBЛњЦїШЫзЩбЏЧыЕуЛїЃКABBЛњЦїШЫ
